



MKS HV50P Digital Microservo 1:12 Pan Car
- Numer zamówienia: MKS-30001
Opis produktu MKS
Ultra-wytrzymałe i super-szybkie, programowalne cyfrowe mikro serwo z metalowymi kołami zębatymi i wałem wyjściowym z podwójnym łożyskiem kulkowym. Serwo zostało zaprojektowane specjalnie dla samochodów wyścigowych w skali 1:12 i opracowane we współpracy z mistrzem Europy Maxem Mächlerem. W celu ułatwienia montażu w różnych typach podwozi, serwo jest umieszczone w plastikowej obudowie, która jest wyposażona zarówno w zwykłe nóżki, jak i nóżki do montażu płaskiego.
Podwyższone napięcie zasilania 3,7-7,4 V (napięcie nominalne), napięcie robocze 3,5-8,4 V.
Dzięki programatorowi/interfejsowi USB dla serwomechanizmów DSP-1 i programowi operacyjnemu na komputer PC można zaprogramować szeroki zakres parametrów serwomechanizmu:
FUNKCJE STANDARDOWE
- Martwa strefa: Wartość sygnału może zmieniać się w pewnych okolicznościach bez wpływu na pozycję wału wyjściowego/dźwigni serwomechanizmu. Wartość domyślna MKS = 1 μs lub 1,2 μs
- Lock (Zamknij): Ustawienie zachowania serwomechanizmu, gdy nie odbiera sygnału sterującego - Utrzymuje pozycję odpowiadającą ostatniemu odebranemu sygnałowi / Silnik jest wolny, serwomechanizm nie utrzymuje pozycji.
- Max. Duty: Moc silnika jest ograniczona tą wartością - ogranicza ona maksymalną moc serwomotoru.
- Pulse Lower: Dolna granica szerokości impulsu sterującego i odpowiadająca jej wielkość odchylenia serwomechanizmu są ograniczone tą wartością.
- Neutral (pozycja neutralna): Ustawia szerokość impulsów sterujących w pozycji neutralnej/środkowej serwomechanizmu.
- Pulse Upper (maks. szerokość impulsu): Górna granica szerokości impulsu sterującego i odpowiadająca jej wielkość odchylenia serwomechanizmu są ograniczone tą wartością.
- Boost (rozruch): Moc silnika podczas rozruchu z zatrzymania. Im wyższa wartość, tym mocniejszy rozruch silnika.
FUNKCJE ZAAWANSOWANE
- Lewy kąt: Maks. Wielkość odchylenia lewego serwomechanizmu.
- Kąt w prawo: Maks. wielkość odchylenia serwomechanizmu w prawo. Wielkość odchylenia serwomechanizmu w prawo.
- Reversion: Odwraca kierunek odchylenia serwomechanizmu.
- Allow Uncont (włącz zabezpieczenie przed awarią): Jeśli sygnał sterujący zawiedzie, serwomechanizm aktywuje wstępnie ustawioną pozycję awaryjną, która odpowiada wartości "Pozycja niekontrolowana".
- Uncontrolled Pos: Jeśli opcja "Allow Uncont" (aktywuj zabezpieczenie przed awarią) jest włączona, zabezpieczenie przed awarią serwomechanizmu jest ustawiane w przypadku utraty sygnału.
- Uncontrolled Time: W przypadku utraty sygnału serwomechanizm przechodzi do pozycji awaryjnej "Uncontrolled Position" po upływie czasu oczekiwania "Uncontrolled Time".
CECHY
Rozmiar serwomechanizmu: Micro
Typ serwomechanizmu: Cyfrowy
Programowalny: Tak
Siła uruchamiająca przy 3,7 V [kg∙cm]: 3,75
Siła uruchamiania przy 6,0 V [kg∙cm]: 6,1
Siła uruchamiania przy napięciu 7,4 V [kg∙cm]: 7,5
Siła uruchamiająca przy 8,2 V [kg∙cm]: 8.3
Prędkość przy 3,7 V [s/60st.]: 0,157
Prędkość przy 6,0 V [s/60st.]: 0,097
Prędkość przy 7,4 V [s/60st.]: 0,079
Prędkość przy 8,2 V [s/60st.]: 0,071
Szerokość impulsu sterującego w pozycji neutralnej [µs]: 1520
Częstotliwość odświeżania [Hz]: 333
Strefa martwa [ms]: 0.001
Przekładnia serwomechanizmu: Metal
Łożysko kulkowe: 2×
Wysokie napięcie: Tak
Zasilanie [V]: 3.7 - 8.4
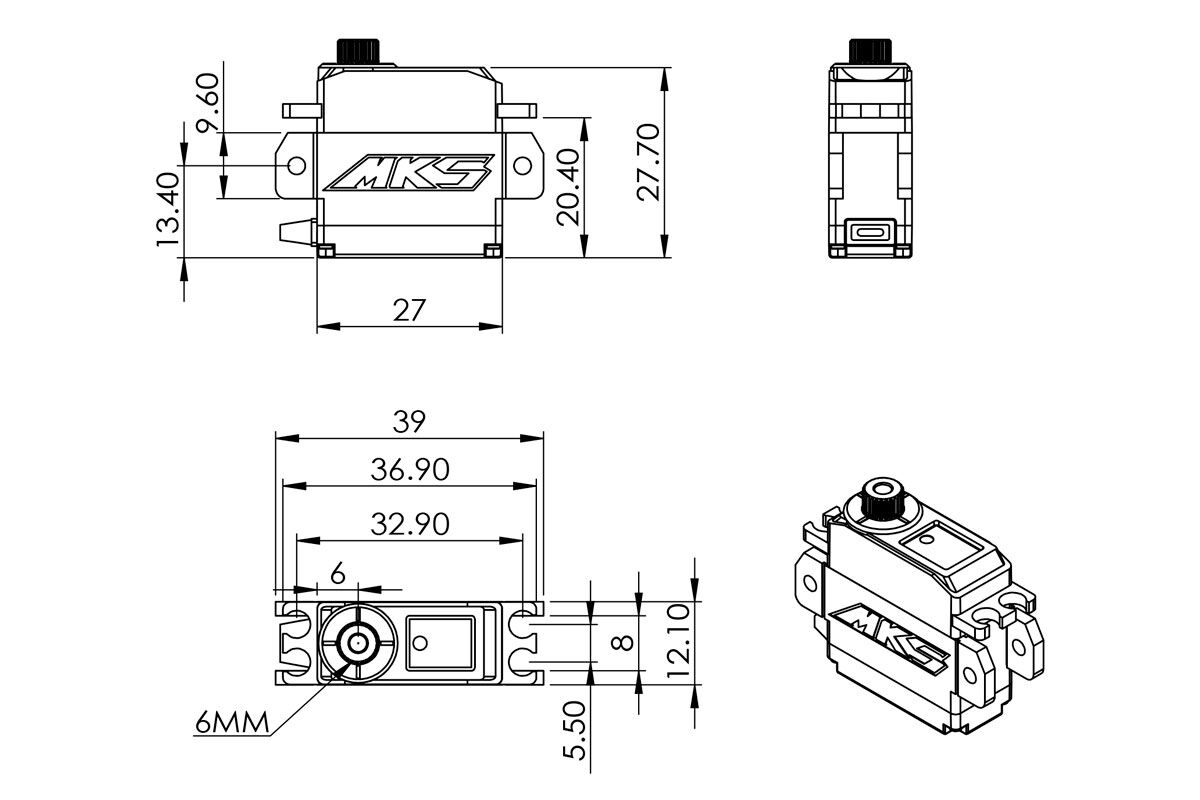
Długość [mm]: 27
Szerokość [mm]: 12.1
Wysokość [mm]: 27.7
Waga [g]: 18.1
Przeznaczenie: 1:12 Pan Car Samochody drogowe
| Elektronika Modelu: | Serwa |