









MIBO Drift King Servo Aluminum Programmable (RWD Drift Spec 33.0kg/8.4V) - Red
- Numer zamówienia: MM-MB-2342-R
Bardzo mocne i szybkie programowalne cyfrowe bezszczotkowe serwo niskoprofilowe ze stalową przekładnią i 2-krotnie łożyskowanym wałem napędowym. Głównie do zastosowania w driftowych samochodach RC w skali 1/10. W pełni aluminiowa obudowa zapewnia doskonałe chłodzenie przy dużym obciążeniu.
To serwo jest specjalnie zaprojektowane dla samochodów driftowych RWD. To co naprawdę wyróżnia to serwo spośród innych serwomechanizmów RWD to jego wyjątkowo wysoka wydajność. Przy standardowych napięciach BEC moment obrotowy jest prawie dwukrotnie większy niż w przypadku większości innych serwomechanizmów. Dzięki temu tor jazdy przednich kół i kąt skrętu jest niezwykle stabilny. Przy zachowaniu tej samej prędkości inicjacji i przejścia, utrzymuje stabilność pojazdu i usuwa niepożądane szarpnięcie z nadmiaru kąta i powrotu. Płynna praca i filtrowanie sygnału żyroskopowego to oczywistość dzięki silnikowi bezszczotkowemu i zaawansowanemu oprogramowaniu.
Można go zaprogramować za pomocąinterfejsu do programowania/interfejsu USB dla MIBO Servo i oprogramowania PC. Można ustawić własne wartości i parametry dla kąta serwa, pozycji neutralnej serwa, tłumienia, mocy wyjściowej, czułości, miękkiego startu, rewersu itp. Masz również możliwość aktywowania trybu SANWA SSR lub FUTABA SR.
Zalecenia dotyczące ustawień:
Podstawowa konfiguracja jest przeznaczona dla różnych podwozi i elektroniki. Zalecamy następujące kroki dla najlepszego dopasowania do Twojego samochodu RC:
- Upewnij się, że wszystkie powiązane wartości (trymery, punkty końcowe, dual rate, itp.) w twoim nadajniku i żyroskopie są w ustawieniach bazowych.
- W przypadku kompatybilnych radiotelefonów możnaaktywować tryb SANWA SSR lub FUTABA SR(musi być również aktywowany w nadajniku).
- Sprawdź kierunek sterowania, także w module żyroskopowym. W razie potrzeby przełączparametr Odwróć .
- < li>Centralne położenie neutralne układu kierowniczego. Jeśli to możliwe, wyreguluj mechanicznie połączenie między tubą serwa a ramieniem kierownicy. Jeśli nie masz tej opcji, użyj parametru Servoneutral.
- Ustaw swój maksymalny kąt skrętu. Pełny obrót kierownicy po obu stronach powinien odpowiadać pełnemu kątowi skrętu podwozia. Przy tym kącie ogranicznik kierownicy powinien lekko dotykać wahaczy lub koła powinny znajdować się w takim położeniu, aby nie było niebezpieczeństwa przeciągania ich po podwoziu. Wyreguluj ją za pomocą tuby serwa lub, jeśli nie jest to możliwe, za pomocąparametru servo angle
- Ustawić parametr Współczynnik tłumienia na minimalną wartość wymaganą do redukcji nierówności.
Funkcje programowalne:
- Wielkość ugięcia: Służy do ustawienia maksymalnej wielkości ugięć serwomechanizmu. Ustawienie domyślne to ok. 120° dla normalnego zakresu szerokości impulsów sterujących (900~2100 µs); ok. 180° dla maksymalnego dopuszczalnego zakresu szerokości impulsów sterujących (500~2500 µs).
- Neutralne położenie serwomechanizmu: Reguluje neutralne położenie (położenie środkowe) serwomechanizmu.
- Tłumienie: Reguluje charakterystykę zachowania serwomechanizmu po zatrzymaniu jego ruchu.
- Moc wyjściowa: Ustawia moc wyjściową serwomechanizmu. Im wyższa wartość, tym szybsze serwo i większa moc - oczywiście pobór prądu też jest proporcjonalnie większy. Zakres: 39,2~100%
- Sensitivity: Ustawia czułość (pasmo nieczułości) serwomechanizmu. Im większa wartość, tym węższe pasmo nieczułości - serwomechanizm będzie się poruszał tylko wtedy, gdy zmiana szerokości sygnału sterującego będzie większa od pasma nieczułości. Jeśli ustawisz zbyt wysoką wartość czułości, w niektórych aplikacjach serwomechanizm może oscylować. Zakres: Ultra High (bardzo wysoki - pasmo nieczułości ok. 1 µs) - High (wysoki - ok. 2 µs) - Medium (średni - ok. 3 µs) - Low (niski - ok. 4 µs)
- Miękki start: Włącza/wyłącza funkcję miękkiego startu. Funkcja ta zapobiega gwałtownemu wejściu serwomechanizmu w pozycję pracy po podłączeniu do zasilania, zmniejszając tym samym ryzyko uszkodzenia jego przekładni.
- Servo Reverse: Odwraca odchylenia serwomechanizmu.
- Tryb SR FUTABA: Tylko do użytku z kanałami zestawów RC FUTABA pracujących w trybie SR. Nie włączaj tej opcji, jeśli używasz innej konfiguracji zestawu RC FUTABA lub innej marki zestawu RC.
- SANWA tryb SSR: Tylko do stosowania z kanałami zestawów RC SANWA pracujących w trybie SSR. Nie włączaj tej opcji, jeśli używasz innej konfiguracji zestawu RC SANWA lub zestawu RC innej marki.
- Fail-safe: W przypadku całkowitego zaniku sygnału sterującego z odbiornika lub braku możliwości prawidłowego wykrycia sygnału przez serwomechanizm (np. z powodu zakłóceń), serwomechanizm może przejść w jeden z trzech trybów awaryjnych:
- (a) Wolny: Fail-safe jest wyłączony.
- (b) Pozycja trzymania: Serwo utrzymuje pozycję odpowiadającą ostatniemu prawidłowo odebranemu sygnałowi.
- (c) Przejście do pozycji neutralnej: serwo powraca do pozycji neutralnej (szerokość impulsu 1500 µs).
- Zabezpieczenie przed przeciążeniem: Aktywuje lub dezaktywuje zabezpieczenie przed przeciążeniem serwonapędu w trzech etapach - gdy tylko przeciążenie utrzymuje się przez ustawiony czas (w sekundach), moc wyjściowa serwonapędu zostaje ograniczona do odpowiedniej ustawionej wartości (w % mocy maksymalnej).
- Reset: Przywraca ustawienia fabryczne podłączonego serwomechanizmu.
Rozszerzone napięcie zasilania 4,8-7,4 V (napięcie nominalne).
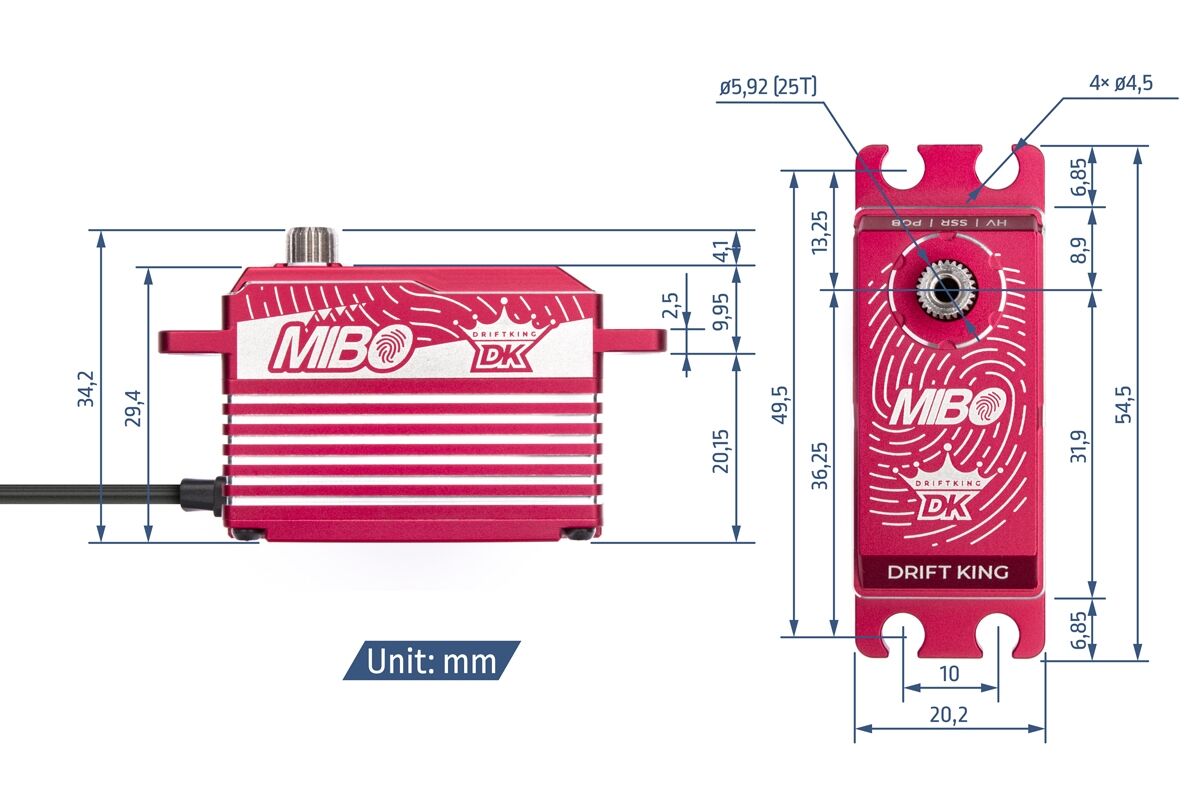
Wałek wyjściowy z zębem 25/5,92 mm tys.
Ze względu na specyfikację wysokiego momentu obrotowego serwa, jest ono o 2,5 mm wyższe niż zwykłe typy niskoprofilowe.
Specyfikacje:
| Wielkość serwomechanizmu | Niski profil + 2,5 mm |
| Typ serwomechanizmu | Cyfrowy |
| Programowalny | Tak |
| Siła aktywacji przy 4,8V [kg/cm] | 20 |
| Siła uruchamiania przy 6,0V [kg/cm] 20 | 25 |
| Siła aktywacji przy 7,4V [kg/cm] | 30 |
| Siła aktywacji przy 8,4V [kg/cm] | 33 |
| Prędkość przy 4,8V [s/60st.] | 0.11 |
| Prędkość przy 6,0V [s/60st.] | 0.09 |
| Prędkość przy 7,4V [s/60st.] | 0.08 |
| Prędkość przy 8,4V [s/60st.] | 0.065 |
| Serwo przekładnia | Metal |
| Łożysko kulkowe | 2× |
| Wysokie napięcie | Tak |
| Zasilanie [V] | 4.8 - 8.4 |
| Długość [mm] | 40.8 |
| Szerokość [mm] | 20.2 |
| Wysokość [mm] | 29.5 |
| Waga [g] | 66 |
| Przeznaczony dla | Drift samochodów drogowych |
| Długość kabla [mm] | 200 |
| Elektronika Modelu: | Serwa |
| Servos: | Low Profile |