









MIBO Drift King Servo Aluminum Programmable (RWD Drift Spec 33.0kg/8.4V) - Black
- N.º artículo: MM-MB-2342-B
Servo digital sin escobillas de perfil bajo, programable, extra potente y rápido, con caja de engranajes de acero y eje de transmisión de 2 rodamientos de bolas. Principalmente para uso en coches de drift RC RWD a escala 1/10. Carcasa completa de aluminio para una refrigeración perfecta bajo alta carga.
Este servo está especialmente diseñado para coches de drift RWD. Lo que realmente diferencia a este servo de otros servos RWD es su rendimiento excepcionalmente alto. A voltajes BEC estándar, el par es casi el doble que el de la mayoría de los servos. Esto mantiene el seguimiento de las ruedas delanteras y el ángulo de giro extremadamente estables. Al tiempo que mantiene la misma velocidad de iniciación y transición, mantiene el vehículo estable y elimina las sacudidas no deseadas del exceso de ángulo y retorno. La suavidad de funcionamiento y el filtrado de la señal del giróscopo son un hecho gracias al motor sin escobillas y al software avanzado.
Es programable con laprogramación/interfaz USB para MIBO Servo y software para PC. Puedes establecer tus propios valores y parámetros para el ángulo del servo, la posición neutra del servo, la amortiguación, la potencia de salida, la sensibilidad, el arranque suave, la marcha atrás, etc. También tienes la opción de activar el modo SANWA SSR o FUTABA SR.
Recomendaciones de instalación:
La configuración básica está diseñada para una gran variedad de chasis y componentes electrónicos. Recomendamos los siguientes pasos para el mejor ajuste a su coche RC:
- Asegúrese de que todos los valores asociados (trims, endpoints, dual rate, etc.) en su transmisor y giróscopo están en la configuración base.
- Para las radios compatibles, puedeactivar el modo SANWA SSR o FUTABA SR(también debe estar activado en su transmisor).
- Compruebe la dirección del timón, incluso en el módulo giroscópico. Cambie elparámetro Invertir si es necesario.
- < li>Centra la posición neutra del sistema de dirección. Si es posible, ajuste mecánicamente la conexión entre el servocuerno y el brazo de dirección. Si no dispone de esta opción, utilice el parámetro Servoneutral.
- Establezca su ángulo de giro máximo. El giro completo del volante a ambos lados debe corresponder al ángulo completo de giro del chasis. En este ángulo, el tope de dirección debe tocar ligeramente los trapecios, o las ruedas deben estar en una posición en la que no haya peligro de arrastre sobre el chasis. Ajústelo con la ayuda del servocuerno o, si esto no es posible, con elparámetro servo angle
- Ajuste el parámetro Factor de amortiguación al valor mínimo necesario para reducir los baches.
Funciones programables:
- Tamaño de deflexión: Permite ajustar el tamaño máximo de las deflexiones del servo. El ajuste por defecto es de aprox. 120° para la gama normal de anchuras de impulsos de control (900~2100 µs); aprox. 180° para la gama máxima admisible de anchuras de impulsos de control (500~2500 µs).
- Posición neutra del servo: Ajusta la posición neutra (posición central) del servo.
- Amortiguación: Ajusta las características del comportamiento del servo cuando se detiene su movimiento.
- Potencia de salida: Establece la potencia de salida del servo. Cuanto mayor sea el valor, más rápido será el servo y mayor será la potencia; por supuesto, el consumo de energía también es proporcionalmente mayor. Intervalo: 39,2~100
- Sensibilidad: Establece la sensibilidad (ancho de banda de insensibilidad) del servo. Cuanto mayor sea el valor, más estrecho será el ancho de banda de insensibilidad - el servo sólo se moverá si el cambio en el ancho de la señal de control es mayor que el ancho de banda de insensibilidad. Si ajusta el valor de sensibilidad demasiado alto, el servo puede oscilar en algunas aplicaciones. Gama: Ultra alta (Extra alta - banda de insensibilidad aprox. 1 µs) - Alta (Alta - aprox. 2 µs) - Media (Media - aprox. 3 µs) - Baja (Baja - aprox. 4 µs)
- Arranque suave: Activa/desactiva la función de arranque suave. Esta función impide que el servo entre bruscamente en la posición de funcionamiento después de ser conectado a la alimentación, reduciendo así el riesgo de daños en su caja de engranajes.
- Servo Reverse: Invierte las desviaciones del servo.
- Modo FUTABA SR: Sólo para uso con canales de conjuntos RC FUTABA que funcionen en modo SR. No active esta opción si está utilizando una configuración diferente de RC set FUTABA o una marca diferente de RC set.
- Modo SSR SANWA: Sólo para uso con canales de conjuntos RC SANWA que funcionen en modo SSR. No active esta opción si está utilizando una configuración diferente del set RC SANWA o un set RC de otra marca.
- Fail-safe: Si la señal de control del receptor falla completamente o el servo no puede detectar la señal correctamente (por ejemplo, debido a interferencias), el servo puede cambiar a uno de los tres modos de emergencia:
- (a) Libre: el Fail-safe está desconectado.
- (b) Posición de espera: El servo mantiene la posición correspondiente a la última señal recibida correctamente.
- (c) Transición a posición neutra: El servo vuelve a la posición neutra (ancho de pulso 1500 µs).
- Protección contrasobrecarga: Activa o desactiva la protección contra sobrecarga del servo en tres etapas: en cuanto la sobrecarga persiste durante un tiempo preestablecido (en segundos), la potencia de salida del servo se limita al valor preestablecido correspondiente (en % de la potencia máxima).
- Reset: Restablece los ajustes de fábrica del servo conectado.
Tensión de alimentación ampliada 4,8-7,4 V (tensión nominal).
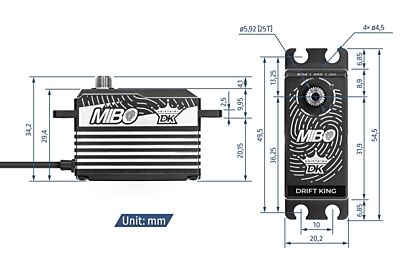
Eje de salida con filo de 25 dientes/5,92 mm.
Debido a la especificación de alto par del servo, es 2,5 mm más alto que los tipos habituales de perfil bajo.
Especificaciones:
| Tamaño del servo | Perfil bajo + 2,5 mm |
| Tipo servo | Digital |
| Programable | Sí |
| Fuerza de accionamiento con 4,8 V [kg/cm] | 20 |
| Fuerza de accionamiento con 6,0 V [kg/cm] 20 | 25 |
| Fuerza de accionamiento con 7,4 V [kg/cm] | 30 |
| Fuerza de accionamiento con 8,4 V [kg/cm] | 33 |
| Velocidad a 4,8V [s/60st.] | 0.11 |
| Velocidad a 6,0V [s/60st.] | 0.09 |
| Velocidad a 7,4V [s/60st.] | 0.08 |
| Velocidad a 8,4V [s/60st.] | 0.065 |
| Servorreductor | Metal |
| Rodamiento de bolas | 2× |
| Alta tensión | Sí |
| Alimentación [V] | 4.8 - 8.4 |
| Longitud [mm] | 40.8 |
| Anchura [mm] | 20.2 |
| Altura [mm] | 29.5 |
| Peso [g] | 66 |
| Destinado a | Coches de carretera de derrape |
| Longitud del cable [mm] | 200 |
| Electrónica para el coche: | Servos |
| Servos: | Low Profile |